
Hey there! I'm currently a second-year Master's (by Research) student in Robotics at Carnegie Mellon University, associated with two wonderful groups, AirLab (Dr. Wenshan Wang and Dr. Sebastian Scherer) and TBDLab (Dr. Aaron Steinfeld). My primary research interest lies in Computer Vision and Multimodal LLMs, particularly in solving challenges related to scene understanding and robot navigation.
Before joining CMU, I earned my Bachelor's in Computer Science from Jadavpur University in India, where I worked on various core vision problems such as object detection, image segmentation and super-resolution. I also spent a year at IIT Bombay in the CMInDS department advised by Dr. Biplab Banerjee, working on how to handle out-of-distribution data in different types of vision applications using VLMs and generative models.
Warning
Problem: The current name of your GitHub Pages repository ("Solution: Please consider renaming the repository to "
http://".
However, if the current repository name is intended, you can ignore this message by removing "{% include widgets/debug_repo_name.html %}" in index.html.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 Carnegie Mellon UniversityRobotics Institute
Carnegie Mellon UniversityRobotics Institute
M.S. Robotics StudentAug. 2024 - Present -
 Jadavpur UniversityB.E. in Computer Science and EngineeringAug. 2019 - May. 2023
Jadavpur UniversityB.E. in Computer Science and EngineeringAug. 2019 - May. 2023
Experience
-
 Robotics Institute, CMUGraduate Research Assistant at AirLab and TBDLabNov. 2024 - Present
Robotics Institute, CMUGraduate Research Assistant at AirLab and TBDLabNov. 2024 - Present -
 IIT BombayResearch Fellow in AIJul. 2023 - Jul. 2024
IIT BombayResearch Fellow in AIJul. 2023 - Jul. 2024 -
 TCS Research and Innovation LabsResearch Intern in RoboticsMay 2022 - Aug. 2022
TCS Research and Innovation LabsResearch Intern in RoboticsMay 2022 - Aug. 2022
News
Selected Publications (view all )
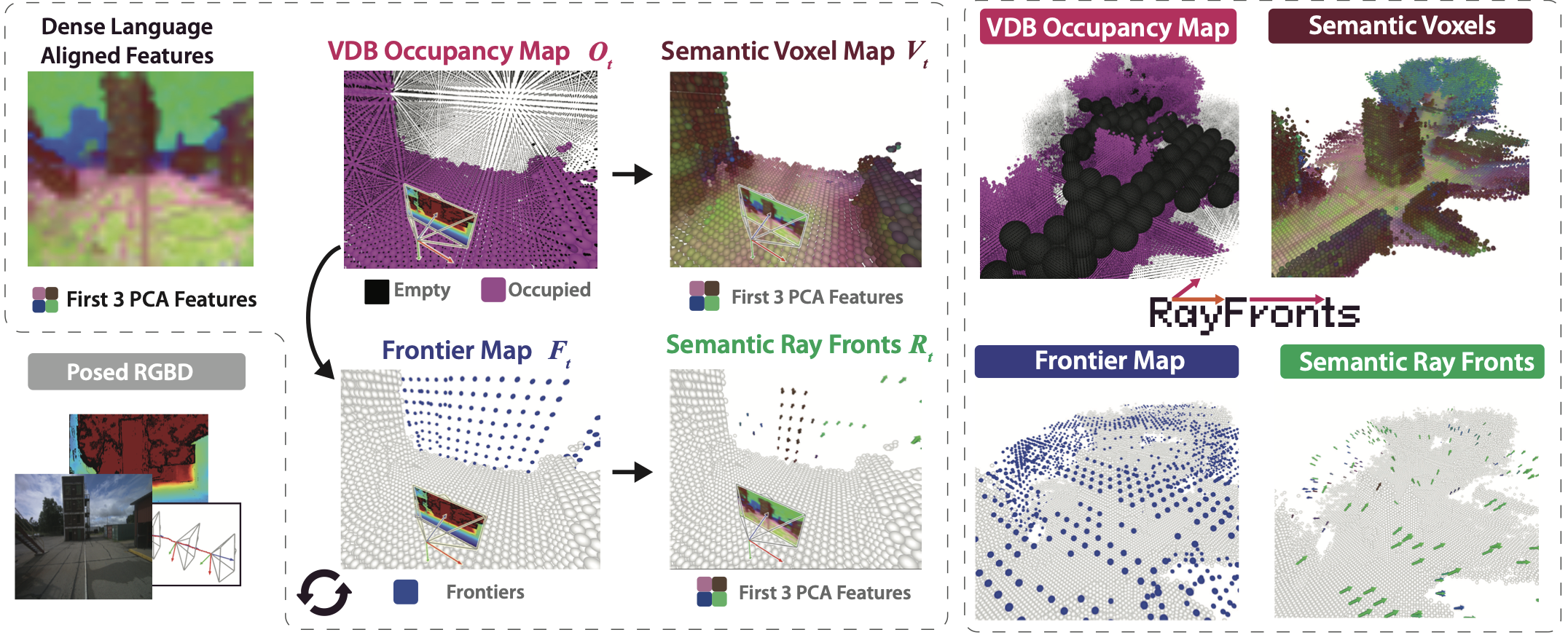
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 Oral
RayFronts offers a unified representation for open-set semantic mapping that bridges the gap between in-range and beyond-range perception in robotic systems. By encoding semantics into both voxels and rays, it enables efficient, fine-grained mapping and planning, even beyond sensor limits, while running in real-time. Our evaluations show significant gains in both segmentation accuracy and exploration efficiency, making RayFronts well-suited for open-world robot navigation.
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025 Oral
RayFronts offers a unified representation for open-set semantic mapping that bridges the gap between in-range and beyond-range perception in robotic systems. By encoding semantics into both voxels and rays, it enables efficient, fine-grained mapping and planning, even beyond sensor limits, while running in real-time. Our evaluations show significant gains in both segmentation accuracy and exploration efficiency, making RayFronts well-suited for open-world robot navigation.
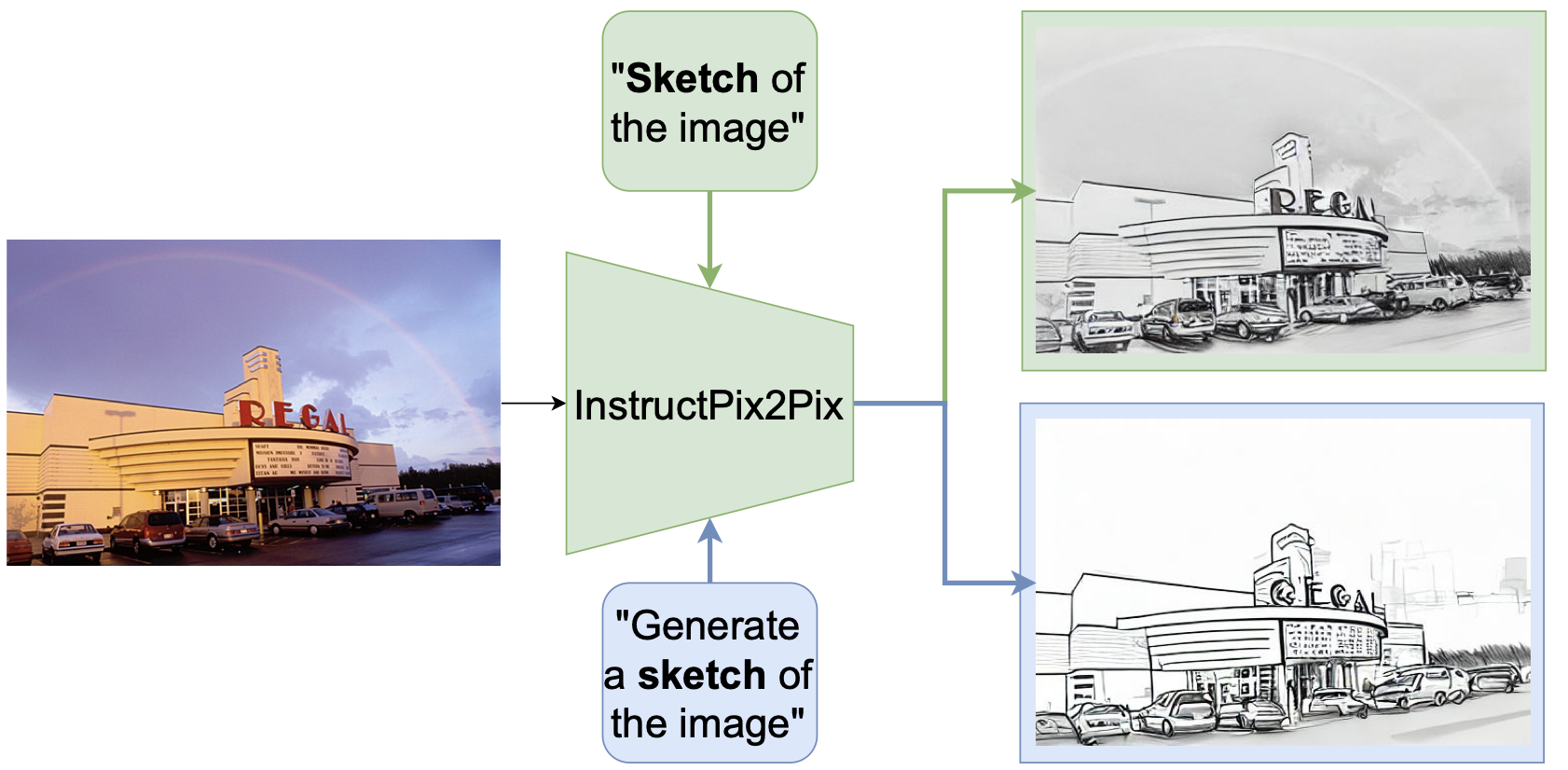
Enhancing the Domain Robustness of Self-Supervised Pre-training with Synthetic Images
Mohamad Hassan N C, Avigyan Bhattacharya, Victor G. Turrisi da Costa, Biplab Banerjee, Elisa Ricci
IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP) 2024
We explore how synthetic data can enhance domain adaptability in self-supervised learning by leveraging InstructPix2Pix to generate semantically consistent, multi-domain image variants. By incorporating these synthetic samples into the training process, we significantly improve generalization across diverse benchmarks like DomainNet, PACS, and Office-Home. Our results highlight the promise of diffusion-based augmentation for robust SSL pre-training.
Enhancing the Domain Robustness of Self-Supervised Pre-training with Synthetic Images
Mohamad Hassan N C, Avigyan Bhattacharya, Victor G. Turrisi da Costa, Biplab Banerjee, Elisa Ricci
IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP) 2024
We explore how synthetic data can enhance domain adaptability in self-supervised learning by leveraging InstructPix2Pix to generate semantically consistent, multi-domain image variants. By incorporating these synthetic samples into the training process, we significantly improve generalization across diverse benchmarks like DomainNet, PACS, and Office-Home. Our results highlight the promise of diffusion-based augmentation for robust SSL pre-training.
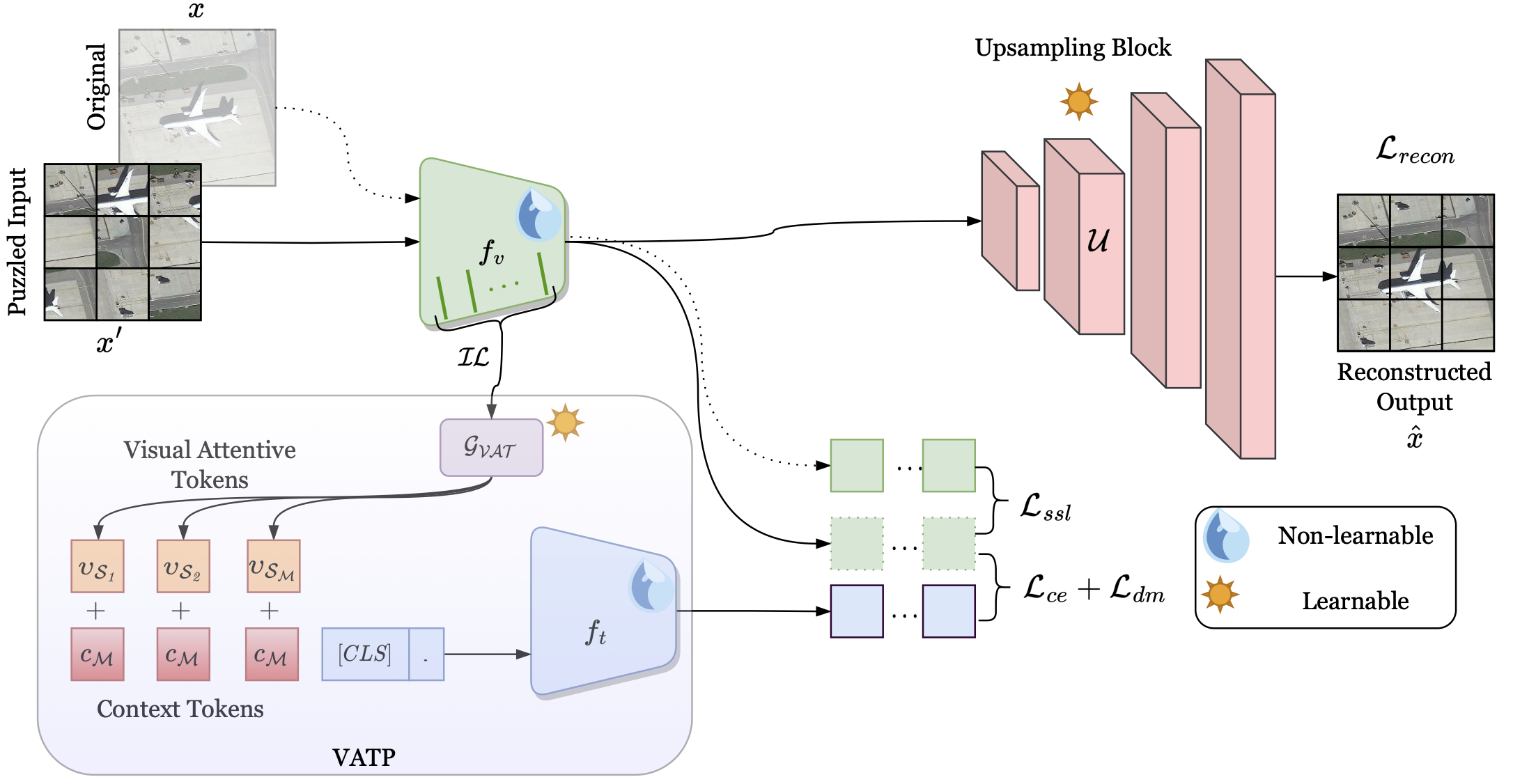
C-SAW: Self-Supervised Prompt Learning for Image Generalization in Remote Sensing
Avigyan Bhattacharya, Mainak Singha, Ankit Jha, Biplab Banerjee
ACM Indian Conference on Vision, Graphics and Image Processing (ICVGIP) 2023 Best Paper Award
We introduce a method designed to enhance CLIP’s performance on domain and class generalization tasks in optical remote sensing. By combining a self-supervised loss with a novel prompt learning strategy that incorporates both domain and content-specific features, C-SAW significantly improves zero-shot generalization without fine-tuning the CLIP backbone. Our experiments show consistent gains across multiple remote sensing benchmarks.
C-SAW: Self-Supervised Prompt Learning for Image Generalization in Remote Sensing
Avigyan Bhattacharya, Mainak Singha, Ankit Jha, Biplab Banerjee
ACM Indian Conference on Vision, Graphics and Image Processing (ICVGIP) 2023 Best Paper Award
We introduce a method designed to enhance CLIP’s performance on domain and class generalization tasks in optical remote sensing. By combining a self-supervised loss with a novel prompt learning strategy that incorporates both domain and content-specific features, C-SAW significantly improves zero-shot generalization without fine-tuning the CLIP backbone. Our experiments show consistent gains across multiple remote sensing benchmarks.
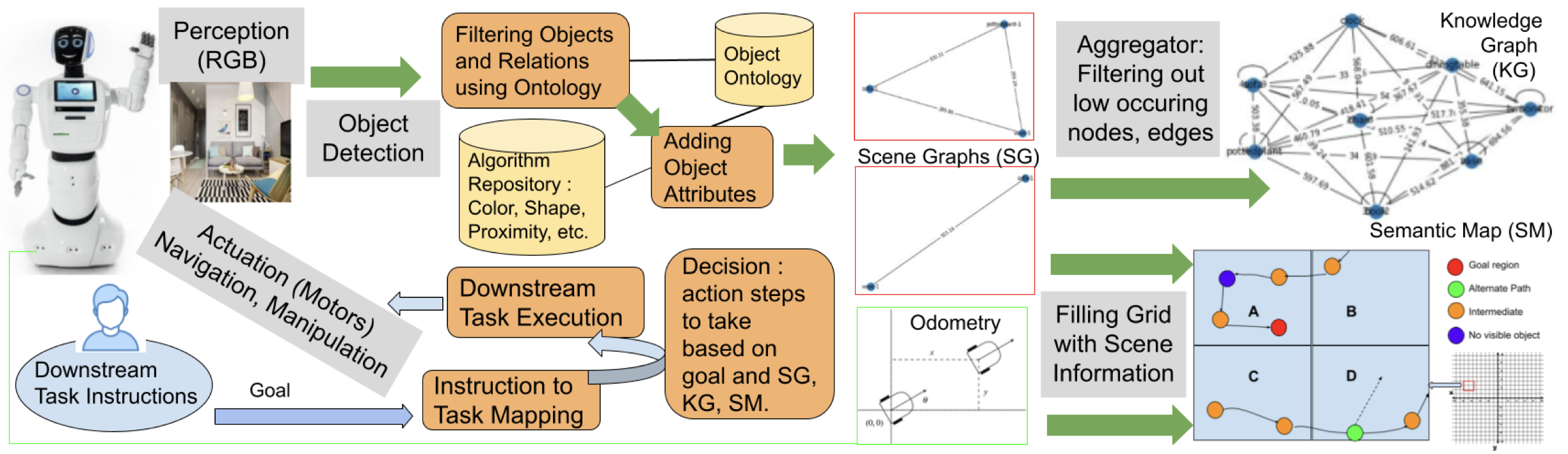
Ontology guided Context Understanding for Robotic Task Execution
Dibyarup Dutta, Avigyan Bhattacharya, Snehasis Banerjee
IEEE International Conference on Robotics and Automation (ICRA) - Workshop 2023
Understanding whether a robot can perform a given task in a specific environment requires more than just perception—it calls for reasoning. In this work, we combine an extended IEEE CORA ontology with semantic web technologies and perception to build scene and knowledge graphs that support task feasibility analysis. The system operates in realistic simulation environments and is designed for smooth transition to physical-world deployment.
Ontology guided Context Understanding for Robotic Task Execution
Dibyarup Dutta, Avigyan Bhattacharya, Snehasis Banerjee
IEEE International Conference on Robotics and Automation (ICRA) - Workshop 2023
Understanding whether a robot can perform a given task in a specific environment requires more than just perception—it calls for reasoning. In this work, we combine an extended IEEE CORA ontology with semantic web technologies and perception to build scene and knowledge graphs that support task feasibility analysis. The system operates in realistic simulation environments and is designed for smooth transition to physical-world deployment.
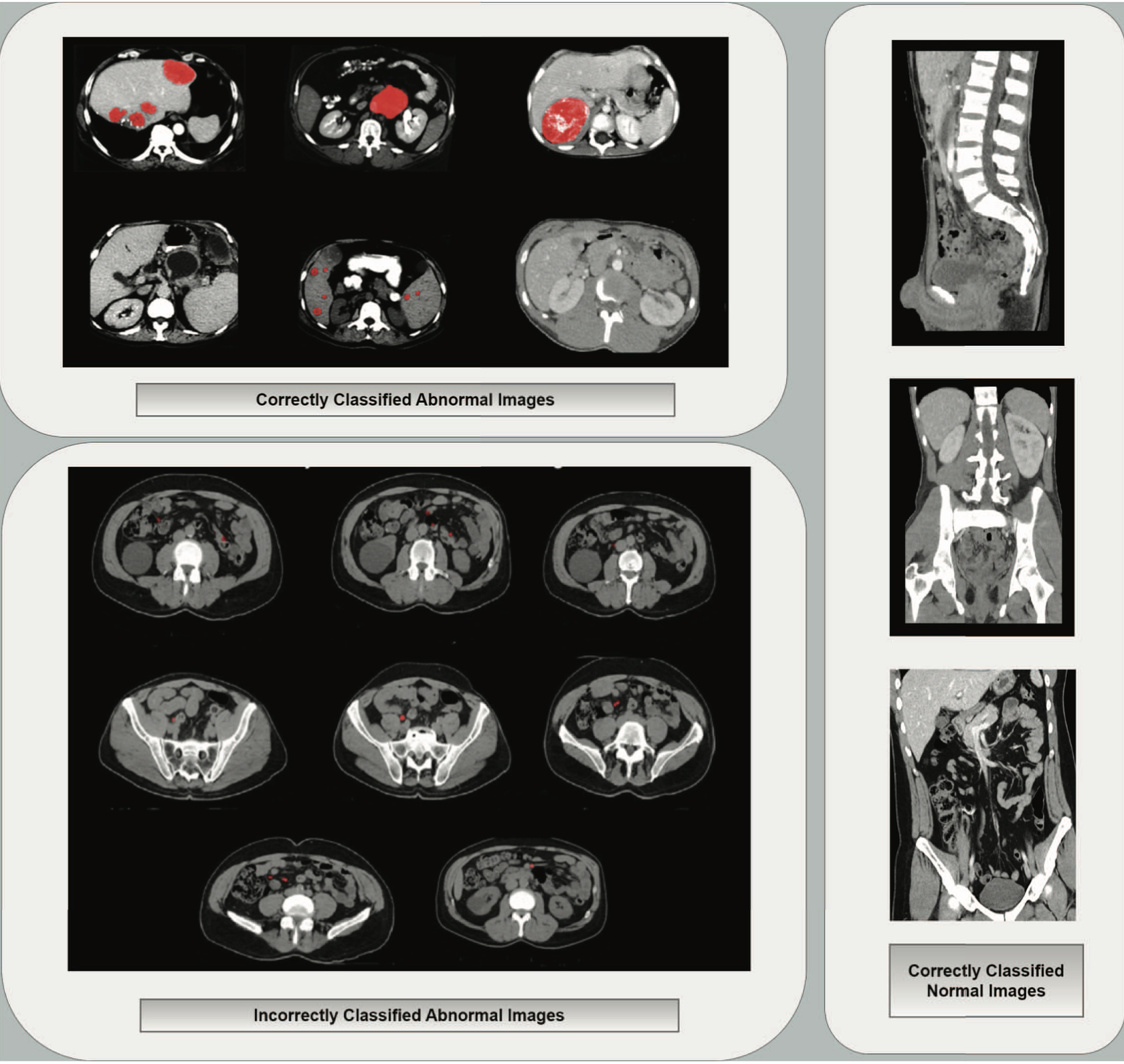
Generating Synthetic Computed Tomography (CT) Images to Improve the Performance of Machine Learning Model for Pediatric Abdominal Anomaly Detection
Samayan Bhattacharya*, Avigyan Bhattacharya*, Sk Shahnawaz (* equal contribution)
IEEE/CVF International Conference on Computer Vision (ICCV) - BioImage Computing Workshop 2023
To address the risks and accessibility issues of CT scans in diagnosing pediatric abdominal pain, we explore generating synthetic CT images from orthogonal X-rays using machine learning. This approach enhances anomaly detection such as cysts and appendicitis, while reducing radiation exposure and dependence on high-end equipment. Our method yields a 9.75% performance boost over X-rays alone, showing strong potential for safer, low-resource diagnostics.
Generating Synthetic Computed Tomography (CT) Images to Improve the Performance of Machine Learning Model for Pediatric Abdominal Anomaly Detection
Samayan Bhattacharya*, Avigyan Bhattacharya*, Sk Shahnawaz (* equal contribution)
IEEE/CVF International Conference on Computer Vision (ICCV) - BioImage Computing Workshop 2023
To address the risks and accessibility issues of CT scans in diagnosing pediatric abdominal pain, we explore generating synthetic CT images from orthogonal X-rays using machine learning. This approach enhances anomaly detection such as cysts and appendicitis, while reducing radiation exposure and dependence on high-end equipment. Our method yields a 9.75% performance boost over X-rays alone, showing strong potential for safer, low-resource diagnostics.